

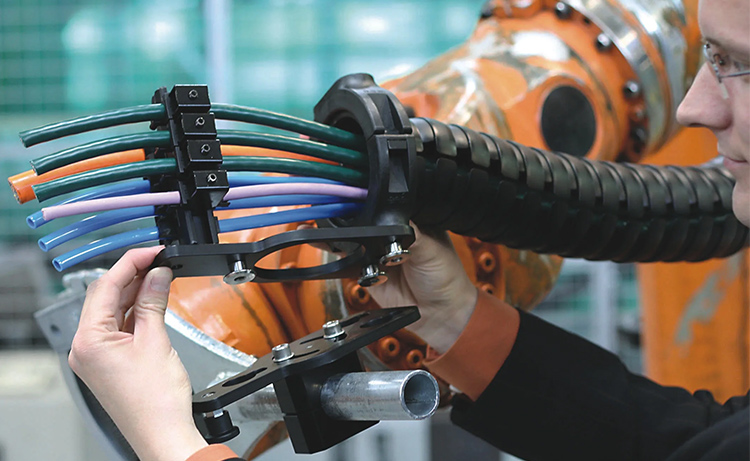
สถานการณ์การใช้งานสายเคเบิลอุตสาหกรรม: ในภาคอุตสาหกรรม สายเคเบิลข้อต่อหุ่นยนต์จำเป็นต้องทนต่อการโค้งงอนับล้านครั้ง โดยใช้ลวดทองแดงชุบเงินเนื้อละเอียดพิเศษและเทคโนโลยีปลอกหุ้มที่มีความยืดหยุ่นสูง ความต้องการผลิตภัณฑ์พิเศษ

สายเคเบิลยืดหยุ่นทางอุตสาหกรรม (สายแขนหุ่นยนต์, สายโซ่ลาก)

สายเคเบิลยืดหยุ่นทางอุตสาหกรรม (สายแขนหุ่นยนต์, สายโซ่ลาก)
กระบวนการสายการผลิตอุตสาหกรรม
 |  |  |
| กระบวนการอัดรีด | กระบวนการประกอบ 1. แนะนำการบิดเดี่ยว: การบิดเท้าแขนเดี่ยวขนาด 1,000 มม 2. แนะนำการเดินสาย: เครื่องพันกรงขนาด 400 มม. - 500 มม | กระบวนการอัดรีดเปลือกนอก |
| สายอุตสาหกรรม - กระบวนการอัดรีด การใช้งาน: เหมาะสำหรับการอัดขึ้นรูปฉนวนแถบฉนวนตัวนำชั้นเดียวด้วยความเร็วสูง คุณสมบัติ: 1. แอพพลิเคชั่นที่หลากหลาย |  |
 | กระบวนการลากคานเท้าแขน 1,000 มม การใช้งาน: เหมาะสำหรับการพันเกลียวหลายเกลียวของสายเคเบิลอุตสาหกรรม (สายโซ่ลาก สายเคเบิลหุ่นยนต์ ฯลฯ) สายเคเบิลข้อมูล และสายไฟ
คุณสมบัติ: 1. แอพพลิเคชั่นที่หลากหลาย |
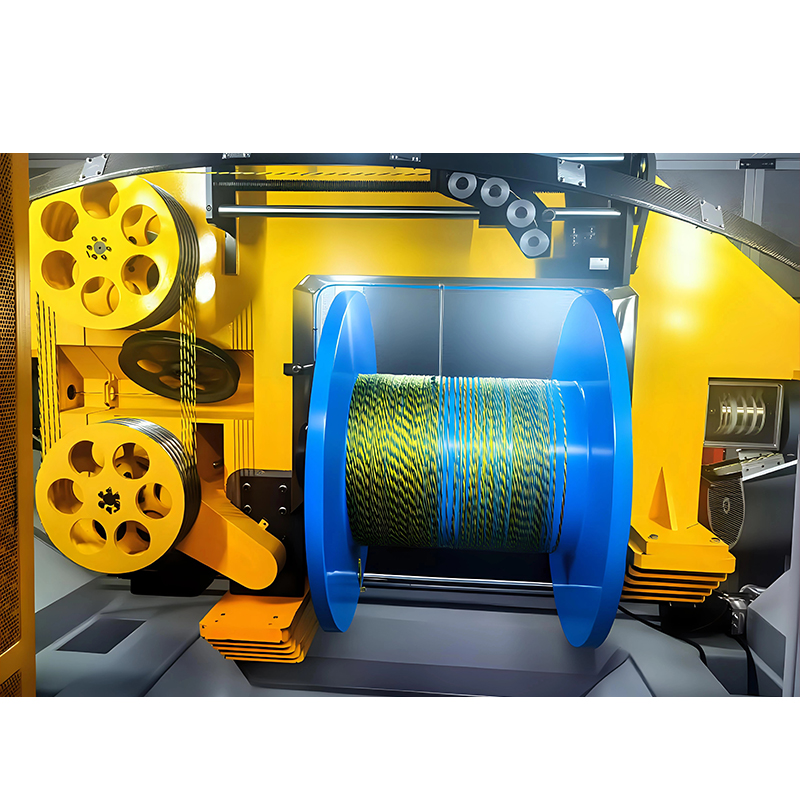
| กว้านเท้าแขนคลี่คลายและโครงจ่ายเงิน เทคโนโลยีที่สำคัญ: ✔ ประสิทธิภาพสูง ความเร็วคลี่คลาย 500 รอบต่อนาที
|  |
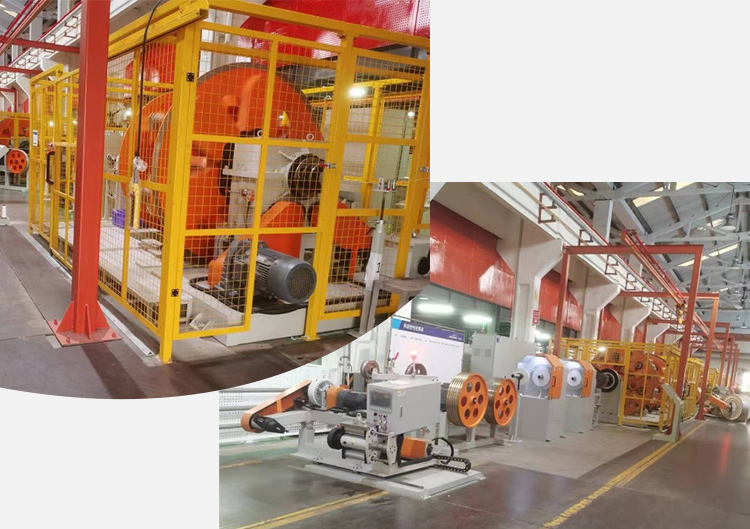 | เครื่องม้วนกรง 400 มม. - 500 มม. (กระบวนการรวม) การใช้งาน: เหมาะสำหรับการประมวลผลสายเคเบิลอุตสาหกรรมมาตรฐานพิเศษที่มีความต้องการสูงเป็นมัด
คุณสมบัติ: 1. การป้อนลวดแบบแอคทีฟ การตรวจสอบโมดูลแรงดึงแบบเรียลไทม์ และการควบคุมผลป้อนกลับแบบวงปิด |
| Cage Windlass - ภาพวาดการออกแบบ คุณสมบัติ: โหมด 1 : 1 6 12 18, 36 หัวการทำงานแบบรวม โหมด 2 : 6 หัว, 12 หัว, 18 หัว, กระจกบังลมกรงอิสระสามตัวสามารถทำงานได้ | 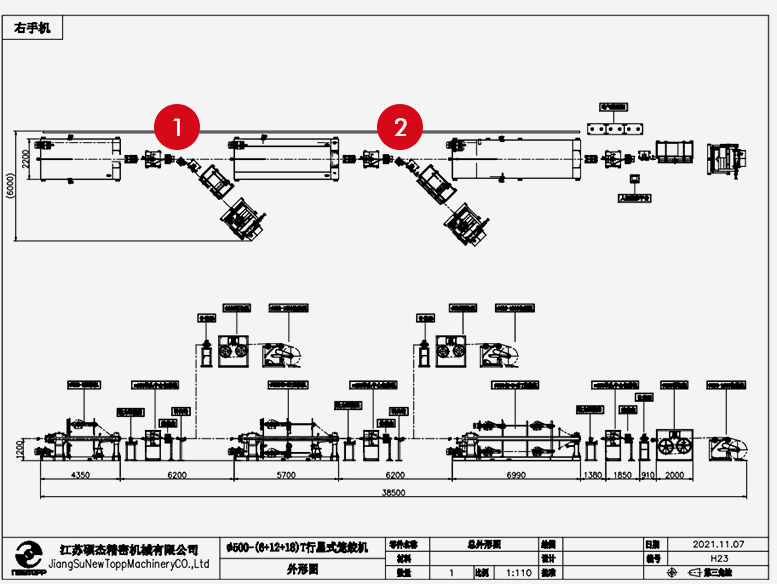 |
ขั้นตอนเครื่องม้วนกรง:
| คลี่คลาย ใช้เซอร์โวมอเตอร์ขนาด 2kW เพื่อขับเคลื่อนรอกม้วนสายไฟเพื่อการคลี่คลายที่ใช้งานอยู่ โมดูลปรับความตึงอัจฉริยะ |  | |
| การรวบรวมสายไฟ มีการใช้ระบบการรับพลังงานแบบสปูล พร้อมด้วย PLC และแผงควบคุมอุตสาหกรรมแยกต่างหาก |  | |
| การรับขึ้น ใช้ล้อคู่ขึ้นพร้อมการตั้งค่าดิจิตอลโดยตรงผ่านหน้าจอสัมผัส ระยะพิทช์ของเกลียวไม่จำกัด |  | |
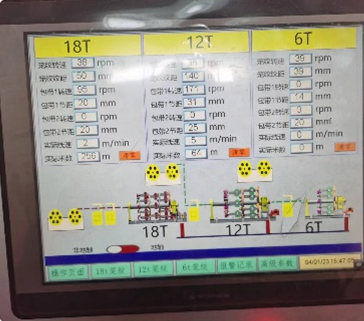
| แผงควบคุมการทำงาน
|   | |
| กระบวนการอัดรีดเปลือกนอก: แนะนำ: เครื่องอัดรีดเปลือกนอกขนาด 70 มม
การใช้งาน: เหมาะสำหรับการอัดรีดเปลือกนอกของสายเคเบิลอุตสาหกรรม, สายเคเบิลข้อมูล, |  |
สินค้าที่เกี่ยวข้อง









-
Phone
อุปกรณ์สายไฟและสายเคเบิล ผู้ผลิตอุปกรณ์เสริมการผลิตสายเคเบิลหุ่นยนต์Address
5
ลิขสิทธิ์ © 2025 Jiangsu NewTopp Precision Machinery Co., Ltd. สงวนลิขสิทธิ์. Wire & Cable Equipment Manufacturer
โรงงานผลิตอุปกรณ์เสริมสายเคเบิลหุ่นยนต์
